Building Efficiency
 0905 545 564
0905 545 564
 hoangnam208@gmail.com
hoangnam208@gmail.com


0905 545 564
hoangnam208@gmail.com

Chế độ điều khiển (control mode) là xương sống của mọi vòng lặp điều khiển trong hệ thống BMS và HVAC. Theo kinh nghiệm vận hành thực tế tại hàng chục Data Center và toà nhà thương mại tại Việt Nam, sai lầm thường gặp nhất không phải là chọn sai thiết bị - mà là cấu hình nhầm chế độ điều khiển cho từng hệ thống. Bài viết này phân tích chuyên sâu 5 chế độ điều khiển cơ bản, giúp kỹ sư BMS và đội ngũ T&C đưa ra lựa chọn chính xác, tối ưu hoá hiệu suất và tiết kiệm năng lượng thực chất.
Bộ điều khiển trong BMS nhận tín hiệu từ cảm biến, so sánh với setpoint, rồi xuất tín hiệu điều khiển thiết bị chấp hành. Chế độ điều khiển nói đơn giản là: khi sai lệch xảy ra, bộ điều khiển sẽ phản ứng mạnh hay nhẹ, nhanh hay chậm. Hiểu đúng từng chế độ là điều kiện tiên quyết để quy trình T&C đạt kết quả tốt.
Tài liệu kỹ thuật từ các khoá đào tạo BMS chuyên nghiệp phân loại 5 chế độ theo mức độ phức tạp tăng dần:
|
Chế độ |
Nguyên lý |
Ứng dụng điển hình |
Độ chính xác |
|
On/Off (2 vị trí) |
Bật/tắt hoàn toàn theo ngưỡng |
Van solenoid, relay nhiệt |
Thấp |
|
Floating |
2 ngõ ra số, thiết bị 'trôi nổi' trong dải |
Van/damper ống gió áp suất thấp |
Trung bình |
|
Proportional (P) |
Tín hiệu ra tỷ lệ thuận với sai lệch |
Van nước lạnh, damper VAV |
Trung bình cao |
|
PI |
P + bù trừ sai số tích luỹ theo thời gian |
Điều khiển nhiệt độ phòng, AHU, FCU |
Cao |
|
PID |
PI + bù trừ tốc độ thay đổi sai số |
Quy trình công nghiệp tốc độ cao |
Rất cao |
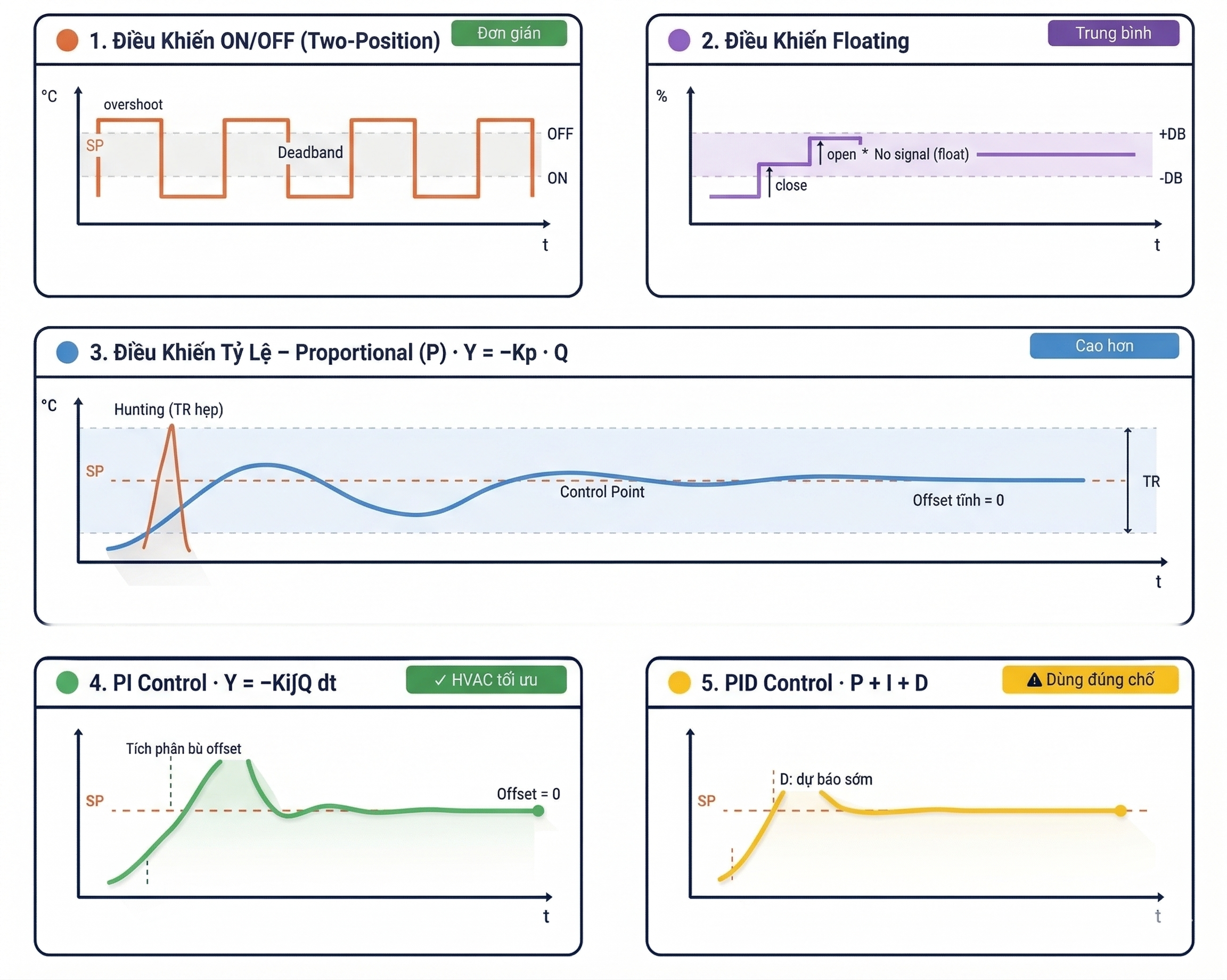
Chế độ On/Off là dạng điều khiển đơn giản nhất: hoặc bật hoàn toàn, hoặc tắt hẳn, không có mức giữa. Do đó, thiết bị chỉ có thể ở trạng thái bật hoàn toàn hoặc tắt hoàn toàn, không có trạng thái trung gian. Đây là chế độ rẻ nhất và dễ triển khai nhất trong bảo trì hệ thống.
2.1. Nguyên Lý Hoạt Động và Deadband
Khi giá trị đo vượt qua setpoint, ngõ ra chuyển trạng thái. Khoảng cách giữa điểm 'bật' và điểm 'tắt' gọi là Deadband (dải chết). Deadband quá rộng > điều khiển kém hiệu quả. Deadband quá hẹp > thiết bị đóng/mở liên tục, mài mòn nhanh.
Quan trọng cần phân biệt hai khái niệm:
2.2. Khi Nào Dùng On/Off?
Theo dữ liệu T&C thực tế, chế độ này phù hợp với hệ thống có quán tính nhiệt lớn và không cần kiểm soát chính xác: van hơi nước nồi hơi, relay giới hạn nhiệt độ ngoài trời (OA reset), cảnh báo freezestat trong AHU. Tuyệt đối không dùng cho vòng lặp điều khiển nhiệt độ phòng chính xác trong Data Center hay phòng sạch.
Floating control là biến thể của On/Off, tạo ra hai ngõ ra số riêng biệt: một lệnh mở, một lệnh đóng. Thiết bị chấp hành (van hoặc damper) giữ nguyên vị trí khi giá trị đo nằm trong dải setpoint - deadband, không nhận lệnh nào cả.
Điểm mạnh của chế độ này là đơn giản hơn điều khiển tỷ lệ nhưng cho phép điều chỉnh vị trí trung gian. Tuy nhiên, nó không hoạt động tốt khi vòng lặp có độ trễ nhiệt lớn. Trong thực tế triển khai BMS, floating control hay được dùng cho damper điều khiển áp suất tĩnh (DSP) trong hệ thống ống gió vận tốc thấp.
Proportional control là bước tiến căn bản so với On/Off: tín hiệu đầu ra thay đổi liên tục, tỷ lệ tuyến tính với sai lệch giữa setpoint và giá trị đo thực tế. Đây là điều khiển liên tục (modulating), phổ biến nhất trong HVAC quy mô lớn.
4.1. Các Khái Niệm Cốt Lõi
Nắm vững 4 khái niệm này là nền tảng để tuning controller trong quy trình T&C:
4.2. Vấn Đề Hunting - Bẫy Chết Trong Commissioning
Đây là vấn đề hay gặp nhất trong quy trình T&C. Khi TR cài đặt quá hẹp (gain quá cao), bộ điều khiển sẽ liên tục tìm kiếm điểm cân bằng, dẫn đến van/damper dao động không ngừng (hunting). Theo kinh nghiệm vận hành thực tế, một hệ thống HVAC đang hunting được nhận diện khi thiết bị chấp hành thay đổi vị trí hơn 20% trong vòng 10 phút.
Giải pháp: mở rộng throttling range để giảm gain, sau đó dùng PI để bù trừ offset phát sinh.
|
Triệu chứng |
Nguyên nhân |
Biện pháp xử lý |
|
Van dao động liên tục |
TR quá hẹp, gain cao |
Tăng TR, giảm Kp |
|
Nhiệt độ không về setpoint |
Offset tĩnh do P thuần |
Chuyển sang PI |
|
Hệ thống phản ứng chậm |
TR quá rộng, gain thấp |
Giảm TR, tăng Kp |
|
Overshooting sau disturbance |
Thiếu Derivative |
Thêm D hoặc dùng PID |
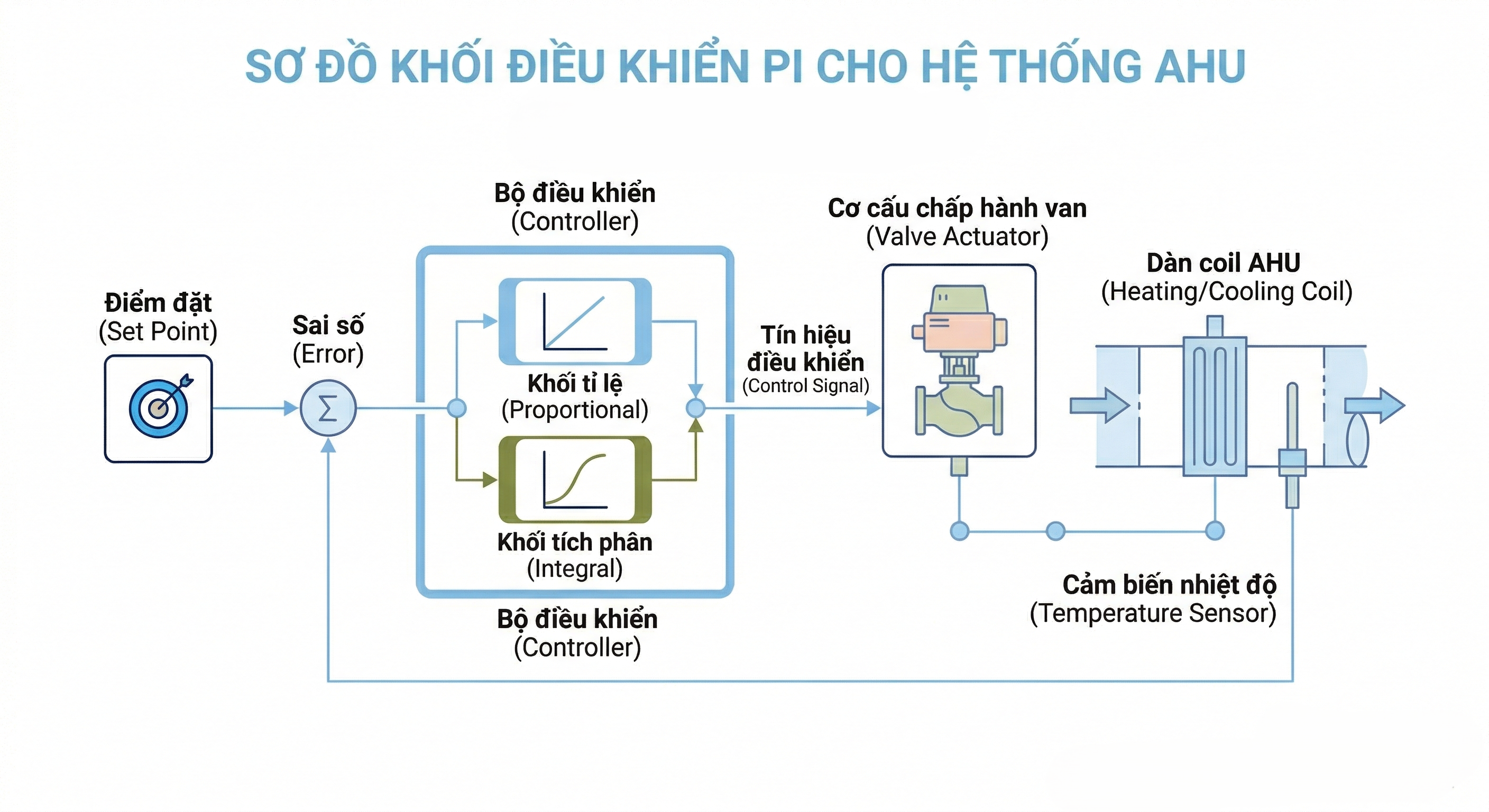
PI (Proportional + Integral) là chế độ điều khiển được khuyến nghị rộng rãi nhất trong đào tạo BMS và T&C cho hệ thống HVAC. Thành phần Integral (I) tích luỹ sai số theo thời gian và liên tục hiệu chỉnh đầu ra cho đến khi offset về đúng bằng 0.
5.1. Tại Sao PI Là Lựa Chọn Tối Ưu Cho Hầu Hết Ứng Dụng HVAC?
Từ dữ liệu commissioning hàng trăm vòng lặp điều khiển tại các tòa nhà thương mại và Data Center, kết quả luôn nhất quán: PI control hoạt động ổn định trong dải hẹp sát setpoint khi được tuning đúng, trong khi P thuần duy trì sai số tĩnh dù cho throttling range bao nhiêu.
Các ứng dụng điển hình của PI trong hệ thống BMS:
Điều khiển nhiệt độ phòng qua FCU, VAV box.
5.2. Khi Nào PI Không Phải Lựa Chọn Tốt?
PI không phù hợp khi setpoint thay đổi thường xuyên và đột ngột, khi tải thay đổi đột biến trong thời gian ngắn, hoặc khi throttling range quá hẹp. Trong những trường hợp này, cần xem xét đến PID hoặc điều chỉnh chiến lược điều khiển cấp cao hơn.
PID thêm thành phần Derivative (D) vào PI, giúp bộ điều khiển dự đoán xu hướng thay đổi của sai số và phản ứng sớm hơn. Về lý thuyết, đây là chế độ điều khiển hoàn hảo nhất. Tuy nhiên, thực tế vận hành trong lĩnh vực HVAC và bảo trì hệ thống cho thấy PID không phải lúc nào cũng là lựa chọn tốt nhất.
6.1. Lợi Thế Của PID
PID thực sự toả sáng trong các hệ thống thay đổi tải nhanh và thường xuyên: quy trình công nghiệp, phòng thí nghiệm kiểm soát môi trường chính xác, hay một số ứng dụng trong Data Center yêu cầu sai số nhiệt độ dưới ±0,5°C. PID có khả năng giữ control point trong dải vài phần mười độ so với setpoint.
6.2. Hạn Chế Nghiêm Trọng Của PID Trong HVAC
Theo kinh nghiệm thực tế tại nhiều dự án, PID khi triển khai sai có thể gây ra các vấn đề nghiêm trọng hơn cả On/Off:
NGUYÊN TẮC THỰC CHIẾN từ kinh nghiệm T&C:
Ổn định (stability) là khả năng hệ thống tìm lại trạng thái cân bằng sau một nhiễu loạn. Hệ thống không ổn định biểu hiện qua dao động ngày càng tăng hoặc thiết bị chấp hành liên tục thay đổi (hunting). Đây là một trong những kỹ năng quan trọng nhất trong đào tạo BMS chuyên sâu.
7.1. Các Nguyên Nhân Gây Mất Ổn Định
7.2. Quy Trình Tuning Chuẩn Trong T&C
Từ thực tế commissioning, quy trình tuning ban đầu nên theo trình tự sau để đảm bảo an toàn và hiệu quả:
|
Bước |
Hành động |
Mục tiêu |
|
1 |
Kiểm tra cơ học dưới chế độ manual |
Xác nhận van/damper hoạt động đúng chiều |
|
2 |
Verify cảm biến và đấu nối I/O |
Loại trừ lỗi đấu dây trước khi auto |
|
3 |
Kiểm tra safety control và fail-safe |
Đảm bảo an toàn khi mất tín hiệu |
|
4 |
Bắt đầu P với gain thấp (TR rộng) |
Tránh hunting ngay từ đầu |
|
5 |
Thêm I với thời gian tích phân dài |
Từ từ triệt tiêu offset |
|
6 |
Thêm D với thời gian đạo hàm ngắn |
Chỉ khi cần thiết – đánh giá kỹ |
|
7 |
Tune từng vòng độc lập |
Không tune heating và cooling đồng thời |
|
Ứng dụng BMS |
Chế độ khuyến nghị |
Tại sao? |
Rủi ro nếu sai |
|
Van solenoid hơi nước |
On/Off |
Thiết bị chỉ có 2 trạng thái |
Không có rủi ro lớn |
|
DSP reset ống gió |
Floating hoặc PI |
Áp suất ổn định, ít lag |
Hunting nếu dùng P |
|
Nhiệt độ phòng FCU/VAV |
PI |
Cần triệt tiêu offset |
Khó chịu, khiếu nại |
|
CHWST/CWT reset |
PI |
Tải thay đổi chậm |
Lãng phí năng lượng |
|
Mixed-air AHU |
PI |
Cân bằng OA/RA |
Mất kiểm soát OA |
|
Phòng sạch / Lab |
PID hoặc PI nâng cao |
Sai số ±0,5°C |
Vi phạm spec môi trường |
|
Data Center CRAC/CRAH |
PI (auto-tune) |
Tải thay đổi nhanh theo IT load |
Nhiệt độ vọt gây alarm |
Chế độ điều khiển không phải chỉ là thông số kỹ thuật trên giấy tờ - đó là quyết định ảnh hưởng trực tiếp đến tiêu thụ năng lượng, tuổi thọ thiết bị và chất lượng môi trường trong suốt vòng đời công trình. Từ On/Off đơn giản đến PID phức tạp, mỗi chế độ điều khiển đều có vị trí tối ưu riêng trong hệ thống BMS.
Bạn đang gặp vấn đề với vòng lặp điều khiển hunting? Hệ thống BMS không đạt setpoint dù đã nhiều lần điều chỉnh? Đội ngũ kỹ sư của Nam Hoàng Controls - với hơn 15 năm kinh nghiệm thực chiến trong BMS, T&C và Data Center - sẵn sàng hỗ trợ:
 0
0