Building Efficiency
 0905 545 564
0905 545 564
 nam.hoang@nhcontrols.com
nam.hoang@nhcontrols.com


0905 545 564
nam.hoang@nhcontrols.com

Chế độ điều khiển BMS đóng vai trò như "bộ não" điều phối toàn bộ hạ tầng cơ điện trong kỷ nguyên của các tòa nhà thông minh và các trung tâm dữ liệu (Data Center) hiện đại. Việc hiểu rõ cách thức các bộ điều khiển phản hồi với tín hiệu cảm biến không chỉ giúp tối ưu hóa hiệu suất năng lượng mà còn kéo dài tuổi thọ thiết bị. Với hơn 15 năm thực chiến trong lĩnh vực quy trình T&C và bảo trì hệ thống, Nam Hoàng Controls nhận thấy nhiều kỹ sư vẫn còn lúng túng khi phân biệt giữa các thuật toán điều khiển. Bài viết này sẽ phân tích sâu sắc 5 phương thức phản hồi cốt lõi, từ đơn giản như On/Off đến phức tạp như PID, giúp bạn làm chủ mọi hệ thống điều khiển tự động.
Chế độ phản hồi bộ điều khiển là cách thức mà một thiết bị điều khiển so sánh giá trị đầu vào từ cảm biến với điểm cài đặt (setpoint) để tạo ra tín hiệu đầu ra điều chỉnh thiết bị chấp hành. Đây là yếu tố quyết định sự ổn định và độ chính xác của toàn bộ vòng lặp điều khiển trong tòa nhà.
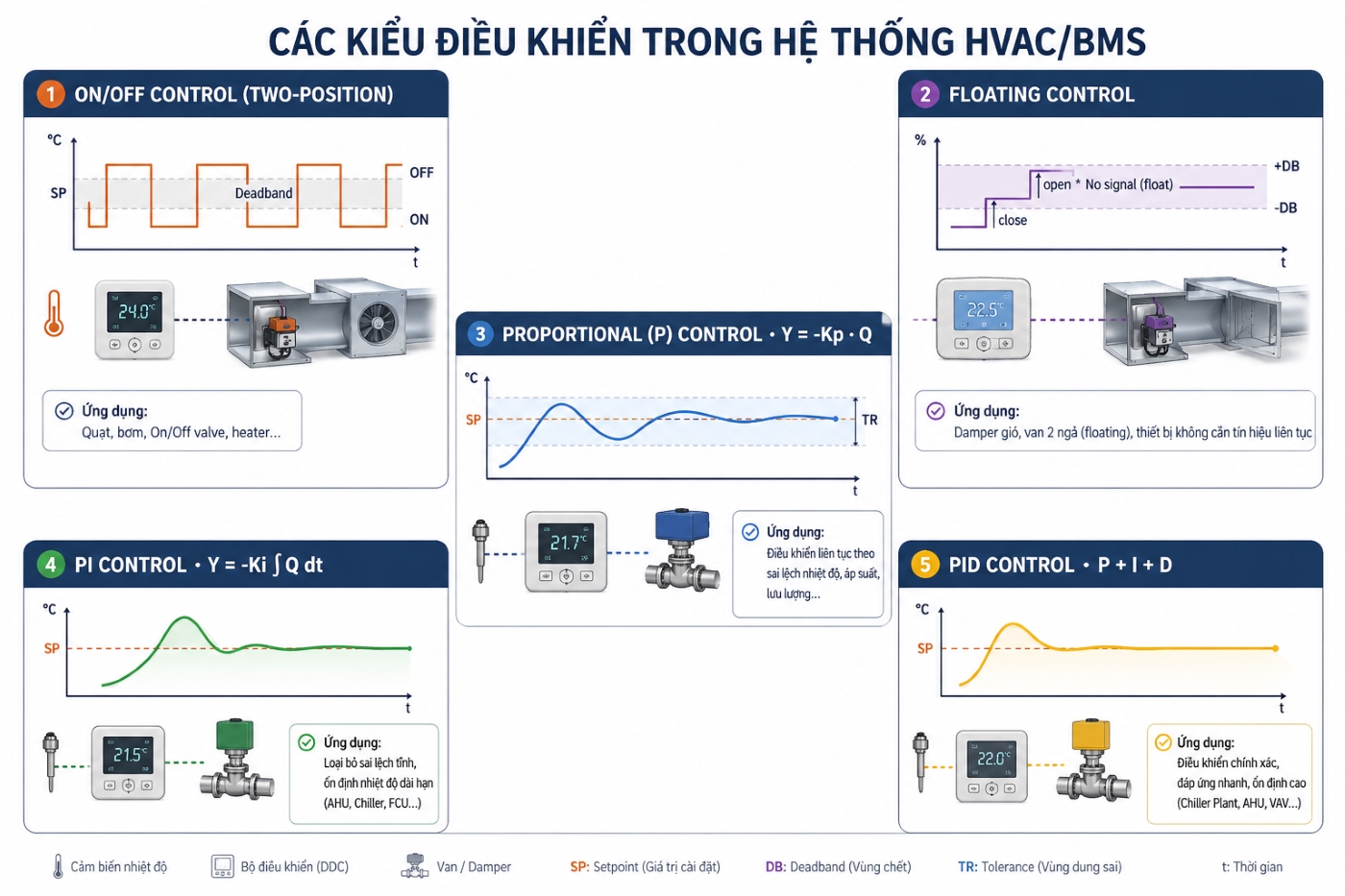
Trong thực tế vận hành, các kỹ sư thường chia các chế độ này thành hai nhóm chính: điều khiển liên tục (modulating) và điều khiển gián đoạn (on-off). Điều khiển liên tục luôn nhận tín hiệu từ cảm biến và cố gắng điều chỉnh thiết bị chấp hành (như van, damper) ở các vị trí trung gian để duy trì điều kiện môi trường ổn định nhất. Ngược lại, điều khiển gián đoạn chỉ hoạt động khi các giới hạn nhất định bị vi phạm. Việc lựa chọn chế độ nào phụ thuộc rất lớn vào tính chất của hệ thống như độ trễ nhiệt, dung tích tải và yêu cầu về độ chính xác của dự án.
Chế độ On/Off là dạng điều khiển đơn giản nhất: hoặc bật hoàn toàn, hoặc tắt hẳn, không có mức giữa. Do đó, thiết bị chỉ có thể ở trạng thái bật hoàn toàn hoặc tắt hoàn toàn, không có trạng thái trung gian. Đây là chế độ rẻ nhất và dễ triển khai nhất trong bảo trì hệ thống.
Trong chế độ này, khái niệm quan trọng nhất là "Differential" (Vi sai). Nếu không có khoảng vi sai này, thiết bị sẽ đóng cắt liên tục khi giá trị cảm biến dao động quanh điểm cài đặt, gây hỏng hóc nhanh chóng cho rơ-le và khởi động từ. Ví dụ, một bộ nhiệt sưởi có setpoint 22°C và vi sai 2°C có thể bật ở 21°C và tắt ở 23°C. Khoảng cách này giúp hệ thống hoạt động ổn định hơn nhưng đánh đổi bằng việc giá trị thực tế luôn dao động (cycling).
Ưu điểm lớn nhất là chi phí thấp và cấu tạo đơn giản. Đây là lựa chọn hàng đầu cho các hệ thống có quán tính nhiệt lớn và công suất tiêu thụ phía tải cao, nơi mà sự thay đổi nhiệt độ diễn ra chậm. Tuy nhiên, nhược điểm chí mạng là độ chính xác kém và luôn xảy ra hiện tượng "vượt ngưỡng" (overshoot) hoặc "dưới ngưỡng" (undershoot). Trong đào tạo BMS tại Nam Hoàng Controls, chúng tôi luôn nhấn mạnh rằng On/Off chỉ nên dùng cho các hệ thống cảnh báo hoặc các vòng lặp không yêu cầu khắt khe về độ ổn định như kiểm soát giới hạn nhiệt độ gió ngoài trời.
Điều khiển Floating là một biến thể nâng cao của On/Off, nơi thiết bị chấp hành (như van hoặc damper) có thể dừng lại ở bất kỳ vị trí nào giữa hai giới hạn khi giá trị điều khiển nằm trong "dải chết" (deadband). Khi nằm trong dải này, bộ điều khiển không gửi tín hiệu, để thiết bị "trôi" tại vị trí hiện tại.
Phương thức này thường sử dụng hai đầu ra kỹ thuật số: một để tăng (mở) và một để giảm (đóng). Nếu áp suất hoặc nhiệt độ ổn định trong dải cho phép, van sẽ giữ nguyên vị trí. Điều này cực kỳ hiệu quả cho các vòng lặp điều khiển khí động học nhanh như áp suất tĩnh trong đường ống gió (Duct Static Pressure). Tại các dự án Data Center, chế độ Floating thường được ứng dụng để điều chỉnh các damper gió thải nhằm duy trì áp suất phòng mà không gây ra sự dao động quá lớn cho hệ thống quạt.
Một điểm lưu ý kỹ thuật là tốc độ di chuyển của thiết bị chấp hành trong chế độ Floating thường là cố định. Tuy nhiên, các bộ điều khiển DDC hiện đại có thể hỗ trợ "multi-speed floating", tức là di chuyển nhanh khi sai số lớn và chậm lại khi tiến gần đến điểm cài đặt. Điều này đòi hỏi kỹ sư T&C phải có kinh nghiệm cấu hình tham số thời gian chạy của actuator (stroke time) một cách chính xác vào phần mềm BMS.
Điều khiển tỷ lệ (P) là phương thức mà vị trí của van hoặc damper được điều chỉnh tỷ lệ thuận với độ lệch giữa giá trị đo được và điểm cài đặt. Thay vì chỉ On/Off, thiết bị chấp hành sẽ di chuyển đến các vị trí trung gian, giúp loại bỏ hiện tượng dao động liên tục của điều khiển hai vị trí.
Trong chế độ này, chúng ta cần làm quen với các khái niệm chuyên sâu như:
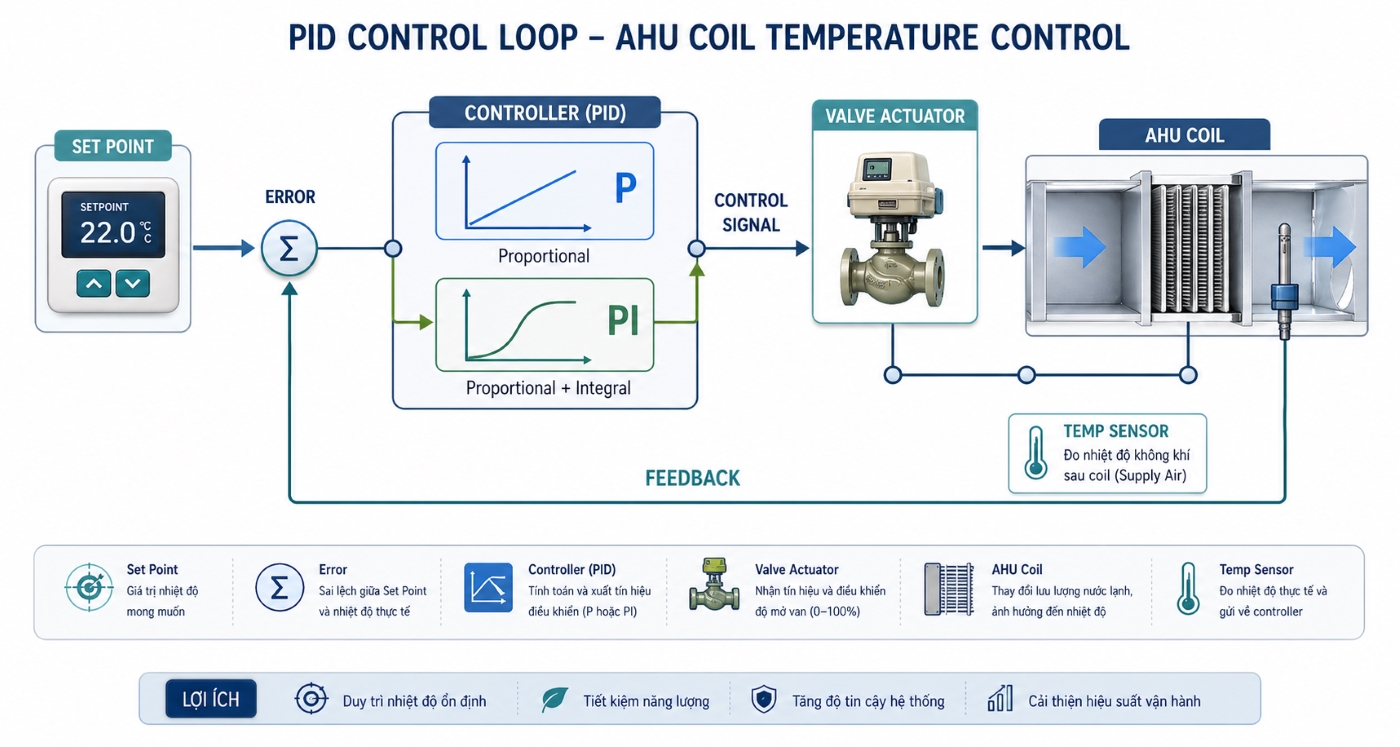
Điều khiển Proportional plus Integral (PI) là "tiêu chuẩn vàng" trong hầu hết các ứng dụng HVAC hiện nay. Bằng cách thêm thành phần tích phân (Integral), bộ điều khiển sẽ cộng dồn sai số theo thời gian và điều chỉnh đầu ra để triệt tiêu hoàn toàn Offset, đưa Control Point về đúng Setpoint.
PI Control hoạt động dựa trên nguyên tắc: chừng nào còn sai lệch, bộ điều khiển còn tiếp tục thay đổi tín hiệu đầu ra. Tốc độ thay đổi này phụ thuộc vào độ lớn của sai lệch và hằng số thời gian tích phân (Integral time). Phương thức này đặc biệt hữu hiệu cho các ứng dụng như điều khiển nhiệt độ phòng, áp suất nước trong hệ thống Chiller hoặc kiểm soát CO2 trong không gian làm việc.
Tại các Data Center, nơi tải nhiệt thay đổi liên tục do hoạt động của máy chủ, PI Control giúp duy trì nhiệt độ gió cấp (Supply Air) cực kỳ ổn định. Tuy nhiên, kỹ sư thực hiện quy trình T&C cần nắm rõ chế độ điều khiển BMS, nếu thông số tích phân cài đặt quá mạnh (thời gian tích phân quá ngắn), hệ thống sẽ rất dễ bị mất ổn định khi có sự thay đổi tải đột ngột. Một vòng lặp PI được tinh chỉnh tốt sẽ vận hành trong một dải hẹp quanh setpoint mà không cần dịch chuyển toàn bộ dải tỷ lệ.
Điều khiển PID bổ sung thêm thành phần vi phân (Derivative), có khả năng dự đoán xu hướng thay đổi của sai số dựa trên tốc độ thay đổi của nó. Thành phần D giúp hệ thống phản ứng nhanh hơn với các nhiễu động đột ngột và giảm thời gian xác lập.
Mặc dù nghe có vẻ hoàn hảo, nhưng trong thực tế BMS, PID không phải lúc nào cũng là lựa chọn tốt nhất. Có hai lý do chính:
Ngoài ra, chi phí commissioning cao: PID đòi hỏi tuning chính xác và tốn công sức. Một vòng lặp PID tuning sai còn tệ hơn On/Off. Nam Hoàng Controls khuyến nghị chỉ sử dụng PID cho các quy trình công nghiệp thay đổi cực nhanh (dưới 1 giây) hoặc các ứng dụng phòng thí nghiệm đặc thù. Đối với HVAC thông thường, PI là quá đủ để đảm bảo sự thoải mái và tiết kiệm điện.
Hiệu chỉnh (Tuning) là quá trình tìm ra các tham số P-I-D tối ưu cho từng vòng lặp điều khiển cụ thể. Một hệ thống BMS dù đắt tiền đến đâu nhưng nếu không được Tuning đúng cách thì cũng chỉ hoạt động như một bộ On/Off đắt tiền.
Theo tiêu chuẩn của Nam Hoàng Controls, quy trình T&C chuyên sâu bao gồm các bước sau:
| Chế độ | Độ chính xác | Thiết bị / Ứng dụng điển hình | Tham số chính | Ghi chú T&C |
|---|---|---|---|---|
| Điều khiển On/ Off | ||||
| On / Off (Two-position) | Thấp | • Bơm CHWP / CWP • Quạt CT / Cooling Tower fan |
• Setpoint • Deadband / Differential • Min ON/OFF time |
Đơn giản: Cần thiết lập min-time để bảo vệ motor, tránh đóng cắt quá liên tục gây cháy hỏng. |
| Floating (Tri-state DDC) | Trung bình | • VAV box damper (áp thấp) • Van 3 ngả motorized (slow loop) |
• Setpoint • Deadband • Stroke time actuator |
Phù hợp: Nếu hệ thống có độ trễ (Lag) lớn thì không nên dùng Floating vì dễ gây sai số tích lũy. |
| Điều khiển modulating | ||||
| P | Khá | • Van nước lạnh FCU (tải ổn định) • Damper VAV áp suất cố định • Van 2 ngả AHU cooling coil |
• Kp (gain) • Throttling Range (TR) • Direct / Reverse action |
Offset tĩnh: Dùng khi chấp nhận được sai số xác lập (offset). Lưu ý TR quá hẹp sẽ gây hiện tượng săn đuổi (hunting). |
| PI (P + Integral) | Cao | • Nhiệt độ phòng FCU / VAV zone • Van nước nóng HW coil • Tốc độ bơm, quạt VSD |
• Kp — Gain • Ti — Integral time (s) • Anti-windup limit |
Khuyến nghị: Đây là lựa chọn mặc định và phổ biến nhất trong HVAC, giúp triệt tiêu sai số xác lập. |
| PID (P + I + Derivative) | Rất cao | • Phòng sạch ISO Class 5–7 (± 0.1 °C) • Phòng thí nghiệm / Lab kiểm soát chính xác • Data Center CRAC tier III/IV (Tải IT thay đổi nhanh) • AHU supply air temp — biến tải nhanh |
• Kp, Ti, Td • Derivative filter • Reposition interval |
Cẩn thận: Tuning sai dẫn đến dao động liên tục làm nhanh hao mòn Actuator. Chỉ dùng khi thực sự cần độ chính xác cực cao. |
Nâng Cấp Năng Lực Đội Ngũ Kỹ Thuật Của Bạn Với Nam Hoàng Controls
Việc làm chủ các chế độ điều khiển BMS là chìa khóa để vận hành tòa nhà thông minh, hiệu quả và bền vững. Nếu bạn đang gặp khó khăn trong việc vận hành, hiệu chỉnh hệ thống hoặc muốn nâng cao trình độ đội ngũ kỹ thuật, hãy liên hệ ngay với Nam Hoàng Controls. Chúng tôi cung cấp các chương trình đào tạo BMS thực chiến, dịch vụ quy trình T&C chuyên nghiệp và gói bảo trì hệ thống định kỳ, giúp tối ưu hóa 100% công suất hạ tầng của bạn.
Xem Khóa Đào Tạo BMS


 0
0






